한국에너지공과대학교(켄텍·KENTECH) 이석주 교수 연구팀이 실제 달 궤도선 영상을 활용해 달 표면의 3차원 지형을 AI로 복원하는 기술 ‘LNEM’을 세계 최초로 개발했다. 켄텍은 한국항공우주연구원(KARI), 한국천문연구원(KASI)과의 공동연구를 통해 이 성과를 거뒀으며, 컴퓨터 비전 분야 최고 권위 국제학술대회인 CVPR 2026에 정규 논문으로 채택됐다고 20일 밝혔다.
LNEM은 뉴럴 렌더링(Neural Rendering)과 엄밀 센서 모델을 결합해 고정밀 수치표고모델(DEM, Digital Elevation Model)을 생성하는 AI 기반 월면 지도 기술이다. 기존에는 달 표면을 입체적으로 복원하기 위해 여러 장의 영상을 비교하는 스테레오 정합(stereo matching) 기법이 주로 사용됐으나, 그림자가 많거나 표면 특징이 부족한 지역에서 정확도가 크게 떨어지는 한계가 있었다. 이번 연구의 핵심은 뉴럴 렌더링 기반 최신 AI 기술을 NASA의 달 정찰 궤도선 LRO와 대한민국 최초의 달 궤도선 ‘다누리’가 촬영한 실제 달 영상에 세계 최초로 적용했다는 점이다. 연구팀은 달 탐사선의 복잡한 촬영 기하학을 반영하는 엄밀 센서 모델을 AI 모델에 직접 결합함으로써 실제 달 탐사 환경에서도 높은 정확도를 구현했다.
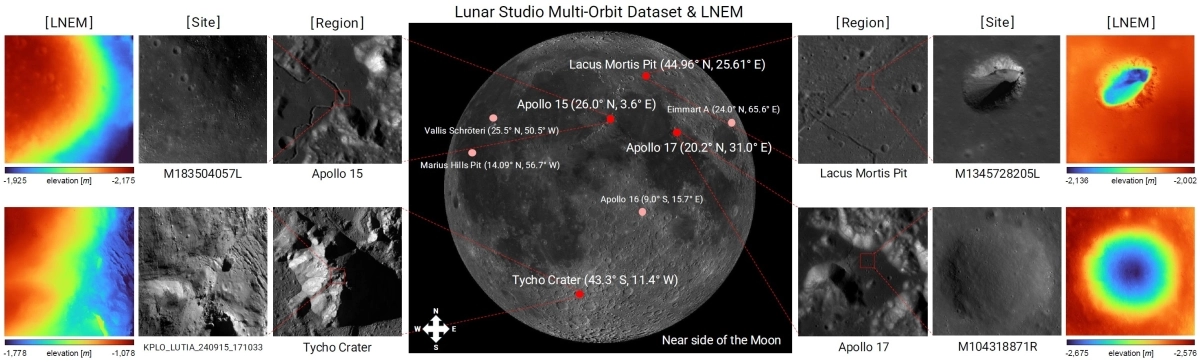
연구팀은 기술 개발에 그치지 않고 복수의 달 탐사선 관측 영상을 통합·활용할 수 있는 데이터 처리 플랫폼 ‘루나 스튜디오(Lunar Studio)’도 함께 구축했다. 루나 스튜디오는 기존에 전문가 중심으로 활용되던 달 탐사 데이터를 AI 연구자들이 보다 쉽게 이용할 수 있도록 설계됐으며, NASA LRO와 다누리의 관측 영상을 통합해 관심 지역에 대한 데이터를 효율적으로 구축할 수 있다. 이번 연구는 한국천문연구원과 한국연구재단의 지원을 받아 수행됐으며 CVPR 2026에서 지난 6월 5일 발표됐다.
이 기술이 실용적 가치를 갖는 것은 단순한 지도 제작을 넘어 미래 달 탐사 임무 전반에 활용될 수 있는 핵심 인프라 기술이기 때문이다. 생성된 고정밀 3차원 월면 지형도는 달 착륙선의 위험 지형 분석과 착륙지 후보 평가, 탐사 로버의 자율주행 경로 계획, 지형 기반 항법 알고리즘 개발 등에 직접 활용된다. 현재 미국·중국·유럽 등 세계 주요 우주 강국들이 달 착륙과 자원 탐사를 위한 경쟁을 본격화하는 가운데, 안전한 착륙지 선정과 탐사 로버의 자율주행에는 고정밀 3차원 지형정보 확보가 필수 전제 조건이다.
한국의 우주 탐사 역량 관점에서 이 연구는 다누리 임무의 성과를 직접 활용해 새로운 기술을 만들어냈다는 점에서 의의가 크다. NASA LRO 데이터와 다누리 데이터를 통합 활용했다는 점은 한미 우주 협력 체계에서도 실질적 연구 성과가 도출되고 있음을 뜻한다. 이 기술이 실제 달 탐사 임무에 직접 적용되려면 지상 검증을 넘어 실제 탐사 시나리오에서의 실시간 처리 성능과 신뢰성을 추가로 검증해야 한다는 과제도 남아 있다. 이석주 교수는 “자율 착륙, 로버 주행, 우주자원 탐사 등 다양한 분야에 기여할 수 있도록 연구를 지속해 나가겠다”고 밝혔다. 한국이 유인 달 탐사를 포함한 아르테미스 프로그램에 참여하는 방향으로 우주 정책이 전개되고 있는 가운데, 우주 탐사와 AI의 융합이 실험실을 벗어나 실제 임무로 이어지는 시점이 점차 가까워지고 있다.
















{kind=link}