학습 기반 자율주행 경로 계획기의 프레임 간 시간적 불일치 문제를 해결하는 확산 기반 계획 프레임워크 확산 강제 플래너(DFP, Diffusion Forcing Planner)가 arXiv에 발표됐다. 작은 프레임 간 오차가 누적돼 불안정한 궤적으로 이어지는 문제는 폐루프 자율주행의 안전성과 탑승 쾌적성을 저해하는 오래된 과제다.
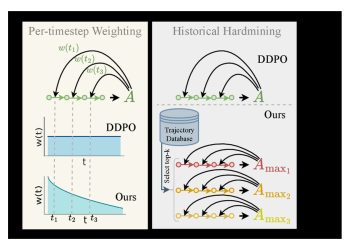
이력 정보를 정적 조건 신호로 단순 주입하는 기존 방법들은 오히려 모델이 이력 패턴을 복사하게 만들어 환경 변화에 적응하지 못하는 부작용을 낳았다. DFP는 전체 궤적을 이력·현재·미래 세 구간으로 분해하고 각 구간에 독립적인 노이즈 수준을 할당하는 비균질 결합 확산 과정을 도입했다. 추론 단계에서는 분류기 없는 유도(CFG)를 이용해 어닐링된 이력 신호로 미래 샘플링을 제어한다. 이 구조는 이력 의존성을 점진적으로 조절할 수 있어, 과거 패턴을 그대로 따르는 것과 현재 환경 맥락을 우선하는 것 사이의 균형을 유지할 수 있다.

폐루프 자율주행 평가 벤치마크 nuPlan에서 DFP는 경쟁력 있는 성능을 내면서 복잡한 주행 시나리오에서 연속적이고 안정적이며 제어 가능한 주행 계획을 생성하는 것으로 확인됐다. 다양한 구성 요소를 제거하며 진행한 절제 실험에서도 이력 어닐링과 비균질 노이즈 구조의 효과가 입증됐다.
확산 모델이 이미지·영상 생성을 넘어 순차 의사결정 과제에도 적용되는 흐름이 이어지는 가운데, DFP는 시간 일관성이 안전 기준과 직결되는 자율주행 분야에서 확산 기반 계획기의 실용 가능성을 높이는 연구로 주목된다. 자율주행 시스템에서 경로 계획의 부드러움과 예측 가능성은 탑승자 신뢰와 규제 승인에 핵심 요건인 만큼, 이 접근법은 학습 기반 계획기를 실차 환경에 적용하는 과정에서 중요한 참조점이 될 것으로 전망된다.
저작권자 © STORIUM 무단전재 및 재배포 금지














{kind=link}