Genesis AI가 2026년 5월 27일 로봇 기초 모델(Robotics Foundation Model) 평가를 위한 오픈소스 물리 시뮬레이션 플랫폼 ‘Genesis World 1.0’을 Apache 2.0 라이선스로 공개했다. 이 플랫폼은 실제 로봇 실험에서 200시간 이상 소요되던 정책 평가 작업을 30분 미만으로 단축할 수 있으며, 시뮬레이션 결과와 실제 로봇 동작 간 상관관계는 피어슨(Pearson) 계수 0.8996을 기록했다.
Genesis World 1.0은 네 가지 핵심 구성요소로 이루어진다. 다양한 물리 현상을 처리하는 물리 엔진, 포토리얼리스틱(사실적) 렌더링을 담당하는 Nyx 렌더러, GPU 연산을 최적화하는 Quadrants GPU 컴파일러, 그리고 외부 로봇 학습 파이프라인과 연결하는 시뮬레이션 인터페이스가 그것이다. 특히 Quadrants GPU 컴파일러는 조작·보행 벤치마크에서 런타임 속도를 최대 4.6배 끌어올렸고, 시뮬레이터 시작 시간은 10배 이상 단축해 수 분 걸리던 작업을 수 초 수준으로 줄였다. 이 같은 성능 개선은 로봇 정책을 반복 검증하는 과정에서 실험 사이클 속도를 크게 높여 준다.

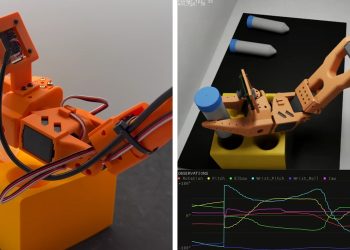
시뮬-투-리얼(Sim-to-Real) 격차 해소는 로봇 AI 개발의 핵심 난제다. 시뮬레이션 환경에서 학습한 정책이 실제 하드웨어에서 동일하게 동작하지 않는 문제가 대량 로봇 배포의 가장 큰 장벽으로 꼽혀 왔다. Genesis World 1.0이 제시한 Pearson 0.8996이라는 상관계수는 시뮬레이션 결과가 실제 동작을 높은 정확도로 예측할 수 있음을 수치로 뒷받침한다. 또한 Apache 2.0 라이선스를 통해 상업적 활용과 코드 수정이 자유롭게 허용되어, 학계와 산업계 모두 별도 비용 없이 즉시 도입할 수 있다.
한국 로보틱스 및 피지컬 AI 산업에 미치는 시사점도 크다. 현대차·삼성전자·LG전자 등 국내 대기업이 경쟁적으로 로봇 AI 개발에 투자하는 상황에서, 실제 하드웨어 실험 시간을 400분의 1 수준으로 압축하는 오픈소스 플랫폼의 등장은 개발 비용과 일정 모두에 직접적인 영향을 준다. 고가의 실물 로봇과 시험 공간 없이도 다양한 정책을 빠르게 검증할 수 있어, 스타트업이나 대학 연구소 등 자원이 제한된 주체도 경쟁력 있는 연구가 가능해진다. Genesis World 1.0은 GitHub를 통해 누구나 접근할 수 있으며, 글로벌 로보틱스 기초 모델 경쟁에서 시뮬레이션 인프라가 핵심 변수로 부상했음을 보여주는 사례다.
저작권자 © STORIUM 무단전재 및 재배포 금지















{kind=link}